让 OpenClaw 接入飞书
在本章节中,你将学到 OpenClaw 接入飞书具体的配置方法,最终能在飞书中和 OpenClaw 进行对话。
OpenClaw 默认提供的 Channels 大部分在国内无法使用(如 WhatsApp、Telegram 等),推荐国内同学使用飞书接入。在最新版本中,OpenClaw 已经将飞书内置到默认渠道,无需再额外安装插件。
在飞书开发者平台创建应用
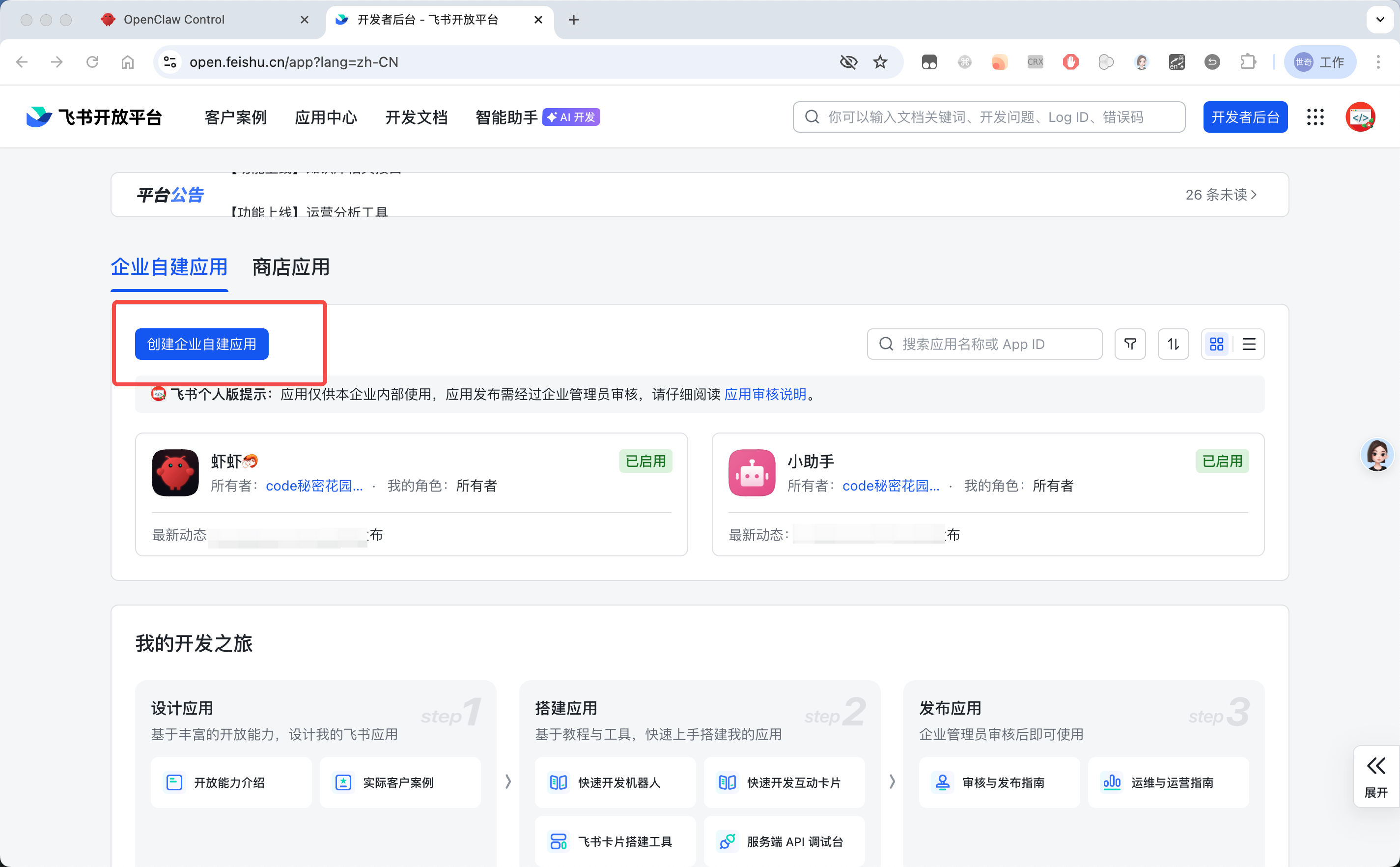
- 登录 [飞书开发者后台] https://open.feishu.cn/app/。
- 点击 “创建企业自建应用”。
- 填写应用名称(例如:
OpenClaw 助手),上传一个专属头像,点击“创建”。

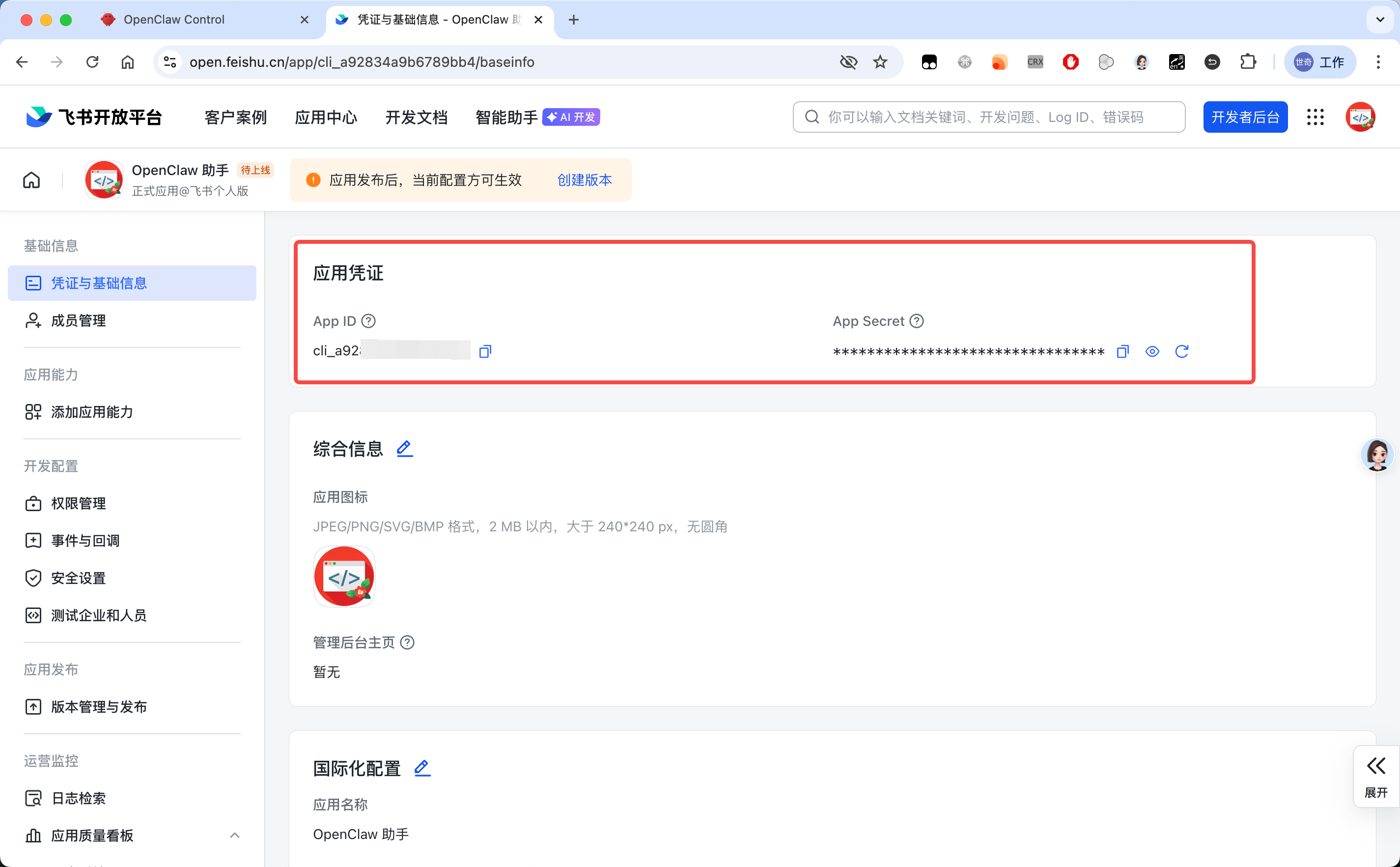
- 创建完成后会进入应用的开发后台,在左侧导航栏,点击 “凭证与基础信息”。
- 找到 App ID 和 App Secret,将这两个值复制并保存下来,稍后在 OpenClaw 中会用到。
开通机器人能力与权限
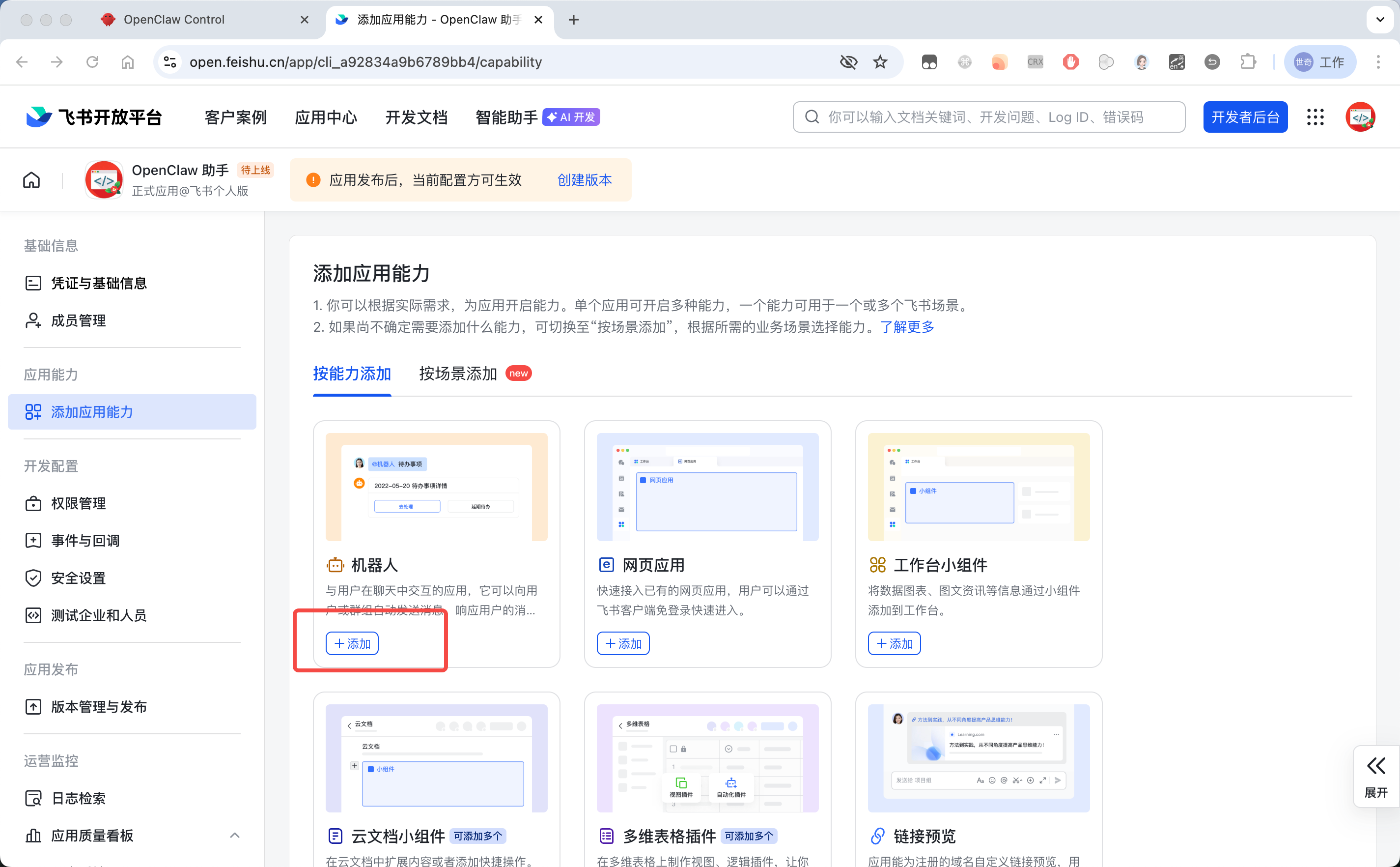
- 在左侧导航栏,点击 “添加应用能力”。
- 选择 “机器人” 卡片,点击“添加”。
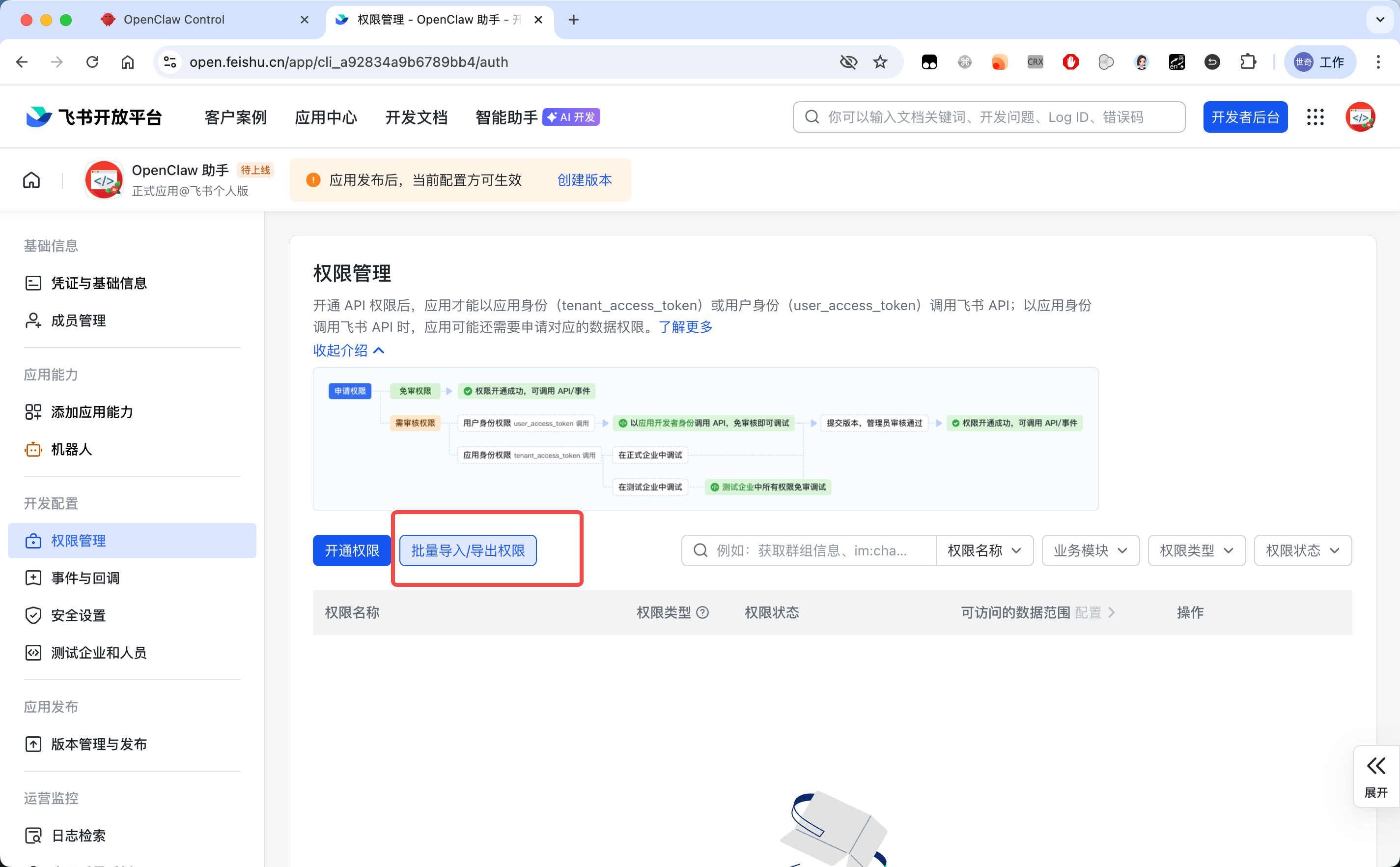
- 在左侧导航栏,进入 “权限管理”。
- 你的机器人需要接收和发送消息的权限。建议开通以下核心权限:
获取单聊、群组消息(im:message:readonly 或 im:message)接收群聊消息/接收单聊消息(im.message.receive_v1)以应用的身份发消息
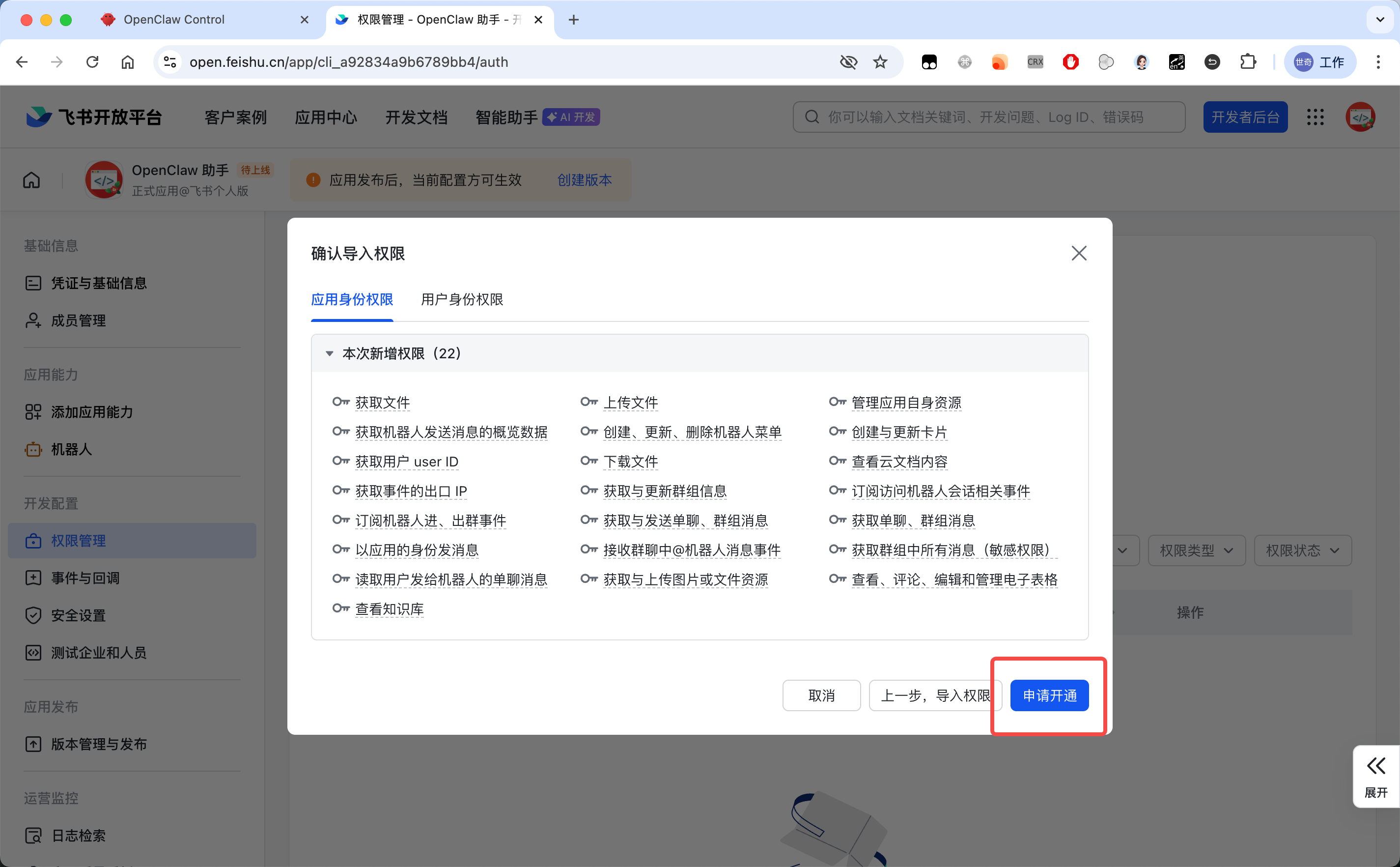
注:如果 OpenClaw 后续需要读取飞书文档或表格,可根据提示再追加 aily:file:read 等文档权限。*为了方便快速配置,你可以直接选择批量导入权限:
然后将下面的 JSON 复制到编辑框中:
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"cardkit:card:write",
"contact:user.employee_id:readonly",
"corehr:file:download",
"docs:document.content:read",
"event:ip_list",
"im:chat",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.group_msg",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource",
"sheets:spreadsheet",
"wiki:wiki:readonly"
],
"user": ["aily:file:read", "aily:file:write", "im:chat.access_event.bot_p2p_chat:read"]
}
}- 复制完成后,点击右下角的 “申请开通”。
第一次发布应用
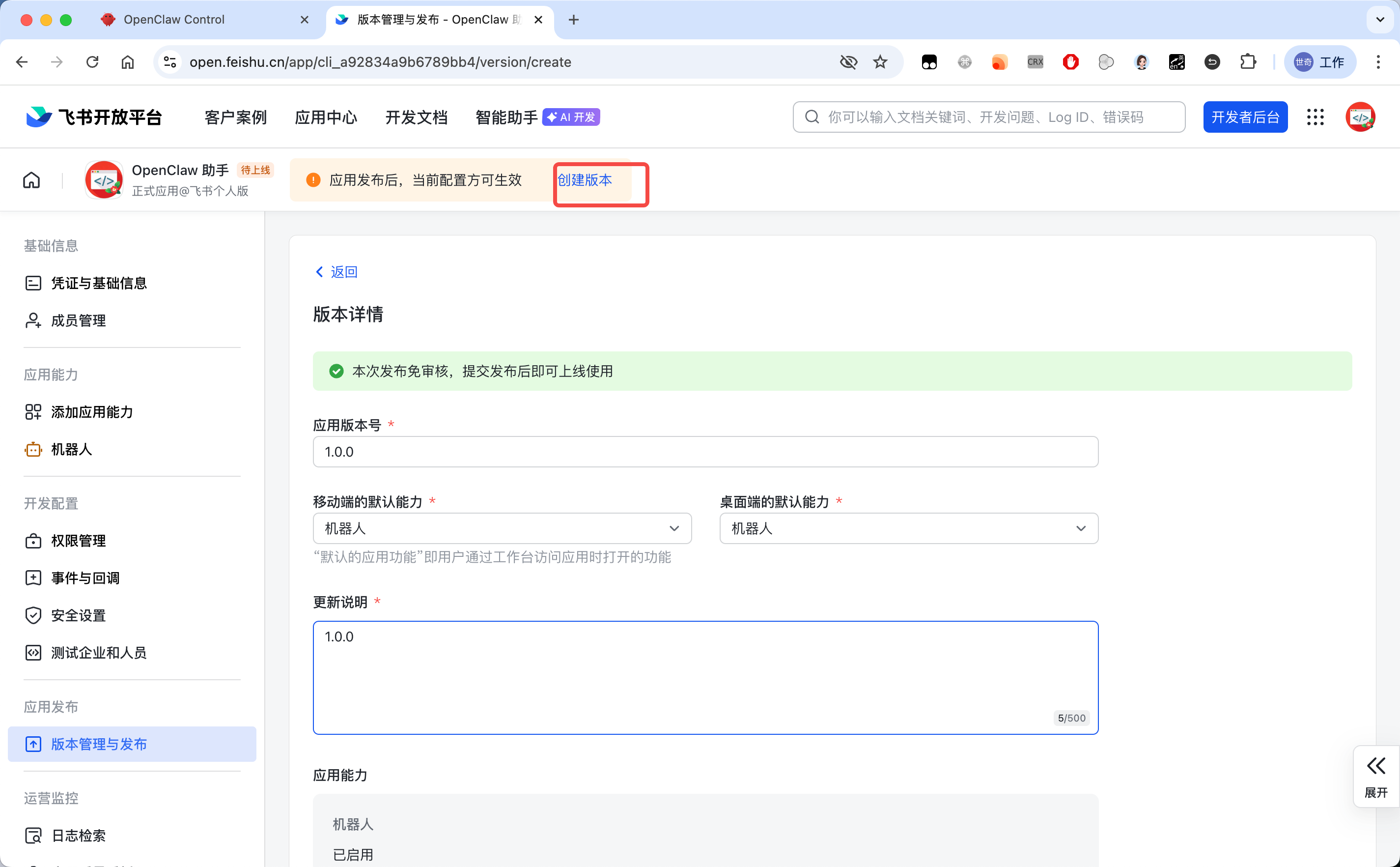
完成这些配置后,我们先发布一下应用,再进行后续的配置(这一步是必须的,如果先进行事件订阅的配置会是无法配置成功的)。
点击上方的创建版本,然后填写版本号、更新说明等信息:
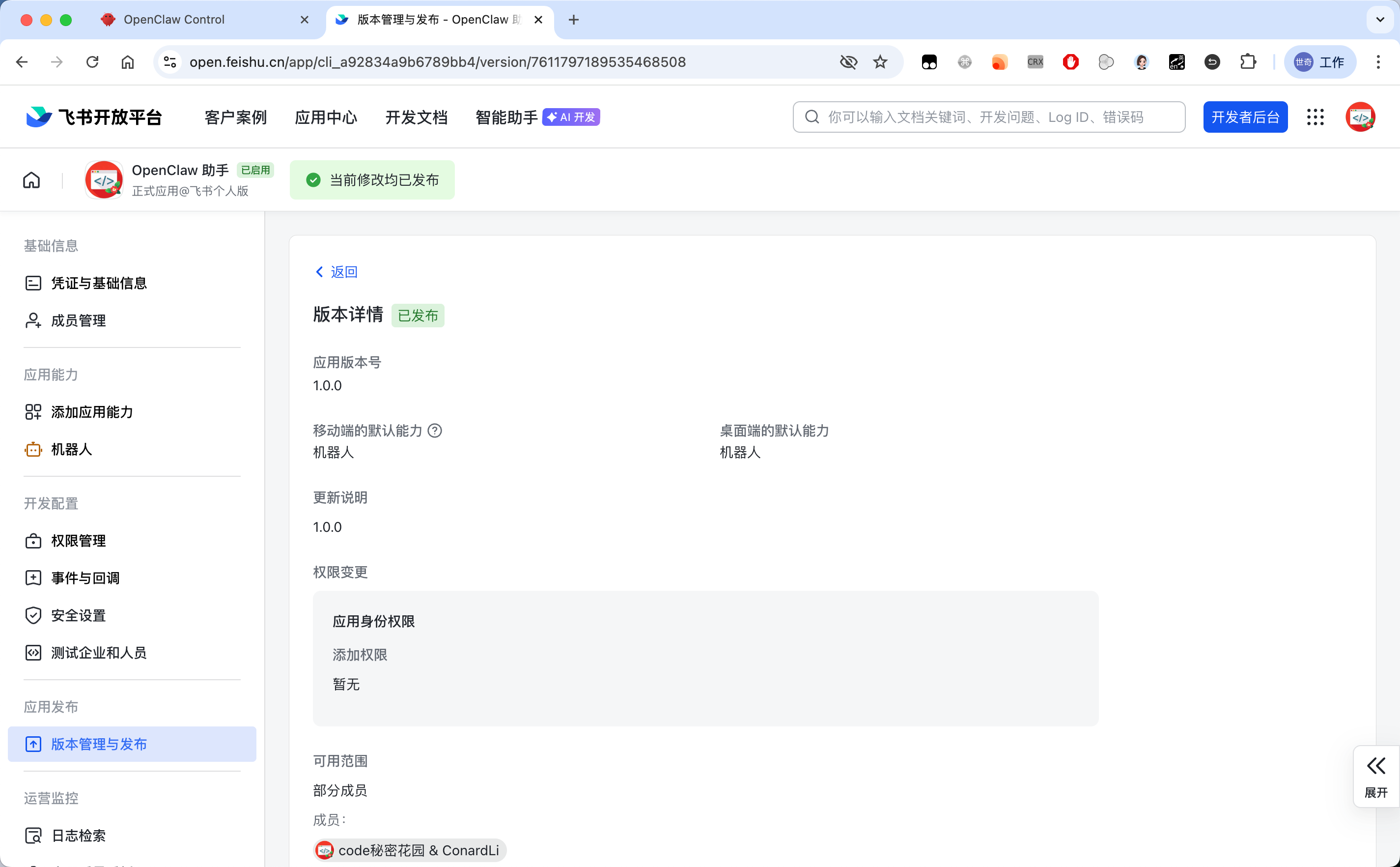
创建完成后,直接点击确认发布,看到状态变为已发布即可:
在 OpenClaw 中配置飞书通道
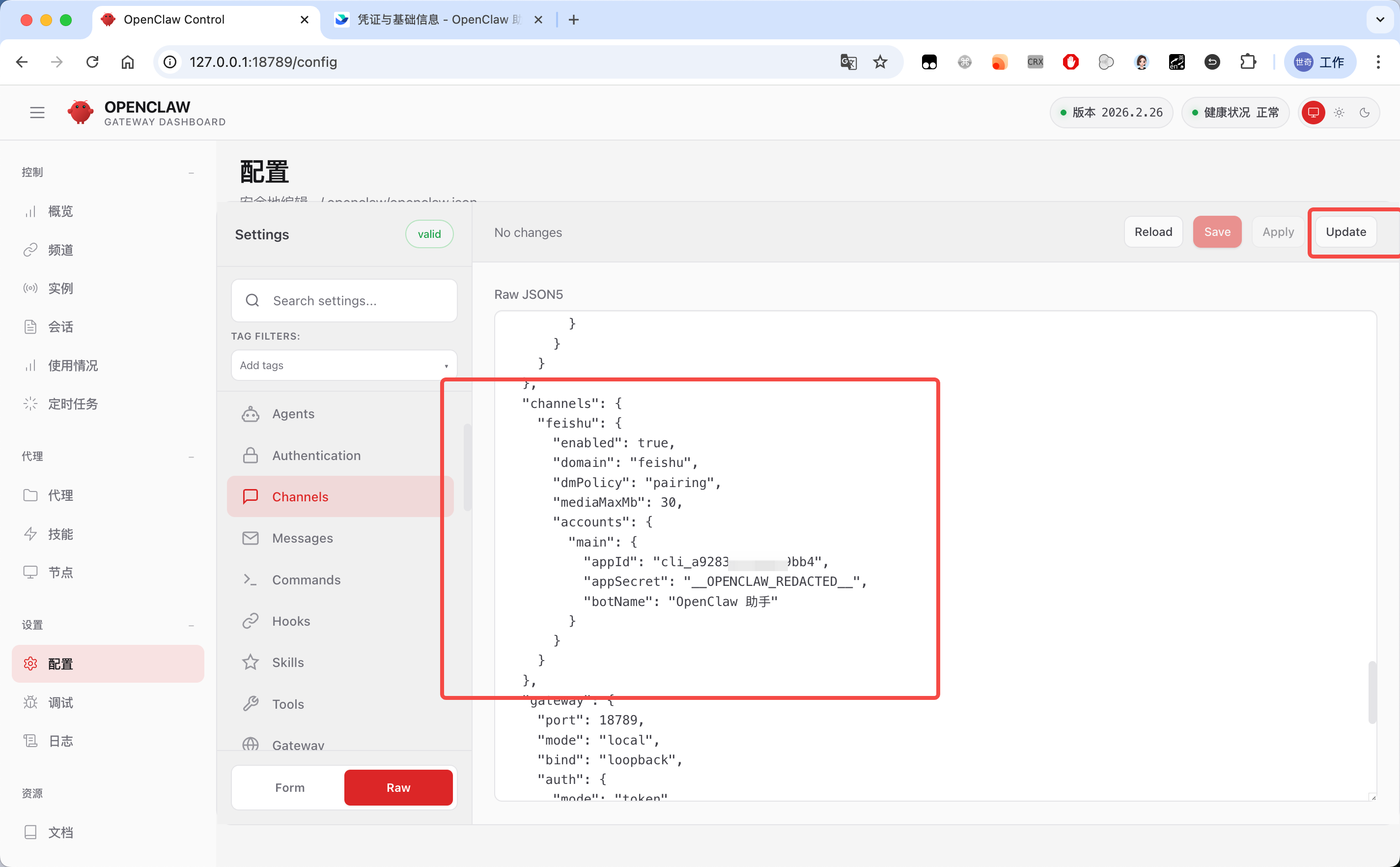
现在,我们要把飞书的凭据告诉 OpenClaw,我们还是直接到配置模块的 Raw 模式直接修改配置,直接复制下面的配置添加进去,然后将 appId、appSecret、botName 进行相应的替换:
{
"channels": {
"feishu": {
"enabled": true,
"domain": "feishu",
"dmPolicy": "pairing",
"mediaMaxMb": 30,
"accounts": {
"main": {
"appId": "替换为刚创建的飞书应用 AppId",
"appSecret": "替换为刚创建的飞书应用 Secret",
"botName": "替换为刚创建的飞书应用 BOT 名称"
}
}
}
}然后点击右上角的 Save 和 Update:
注意这一步配置完成后还无法直接使用飞书通信,还要完成最后一步事件订阅的配置。
配置事件订阅
为了让 OpenClaw 能实时收到你在飞书发出的消息,我们需要配置事件订阅。
考虑到大部分本地部署的 OpenClaw 没有公网 IP,强烈推荐使用飞书的长连接模式。
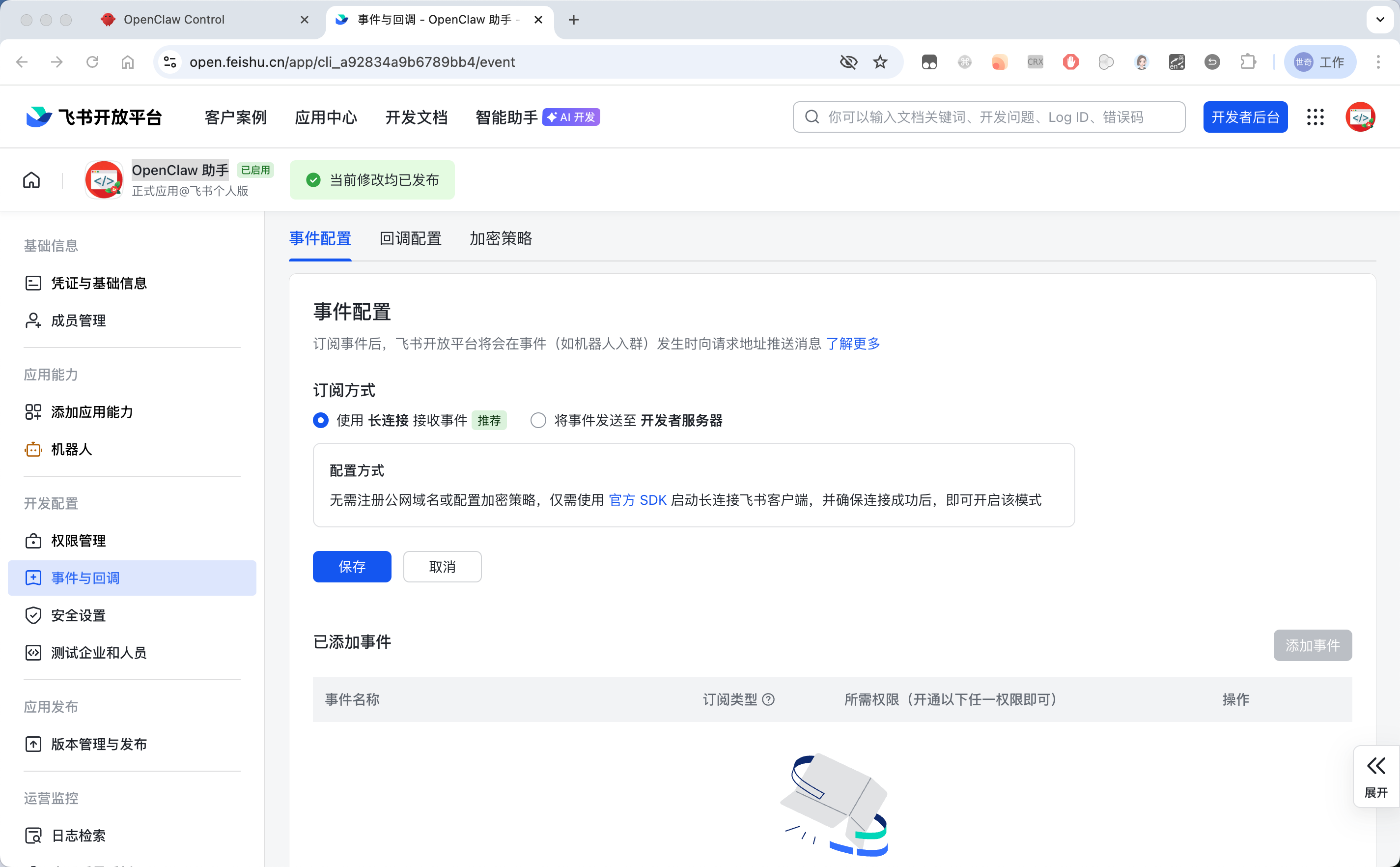
- 在左侧导航栏点击 “事件与回调”。
- 在“事件配置”页签中,点击 “订阅方式”。
- 选择 “使用长连接接收事件”(WebSocket 模式),点击保存。
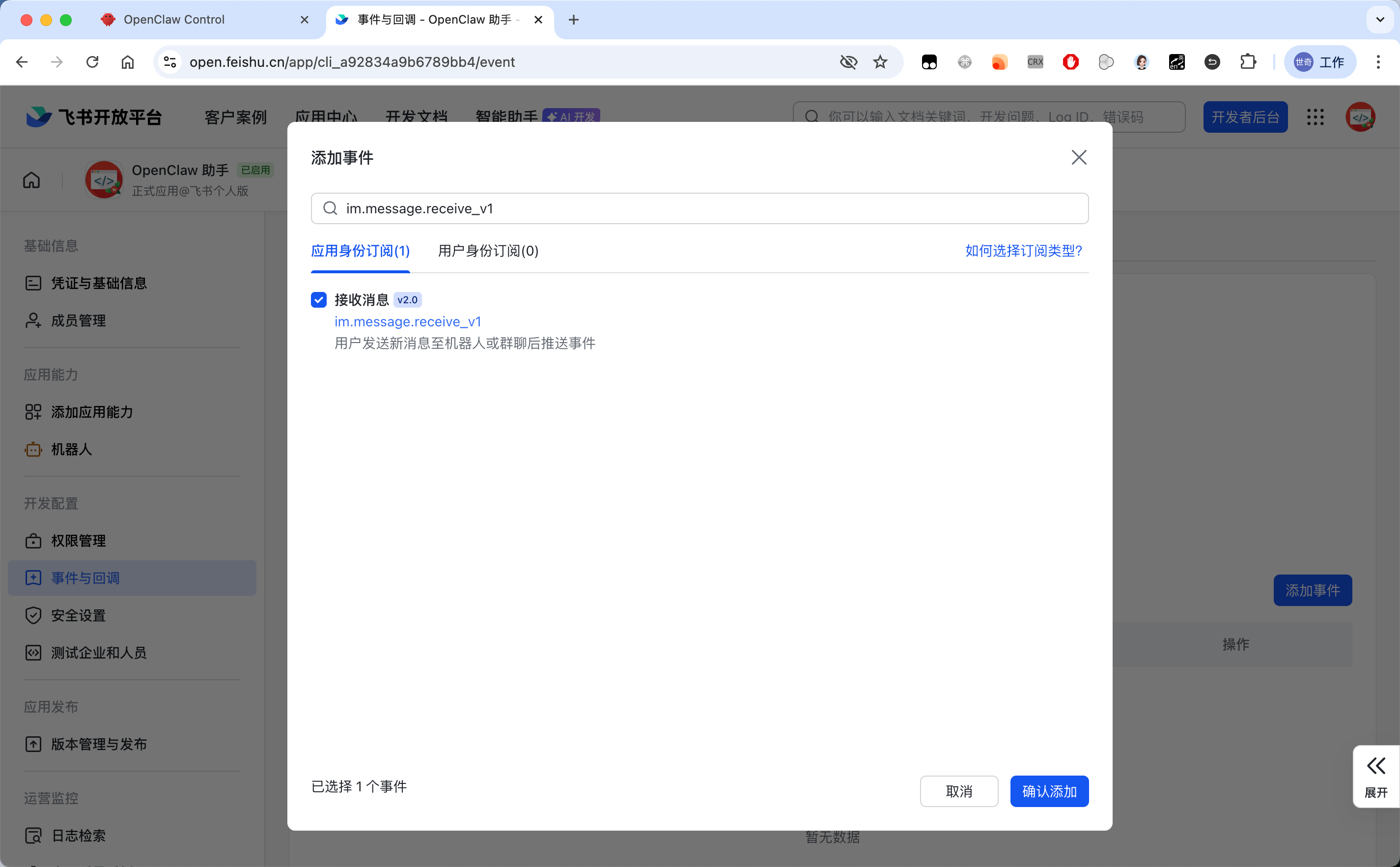
- 点击 “添加事件”,搜索并勾选
接收消息 (im.message.receive_v1),点击确认添加。
- 再按照类似的步骤,打开机器人的回调配置,同样选择长连接方式来接受回调。
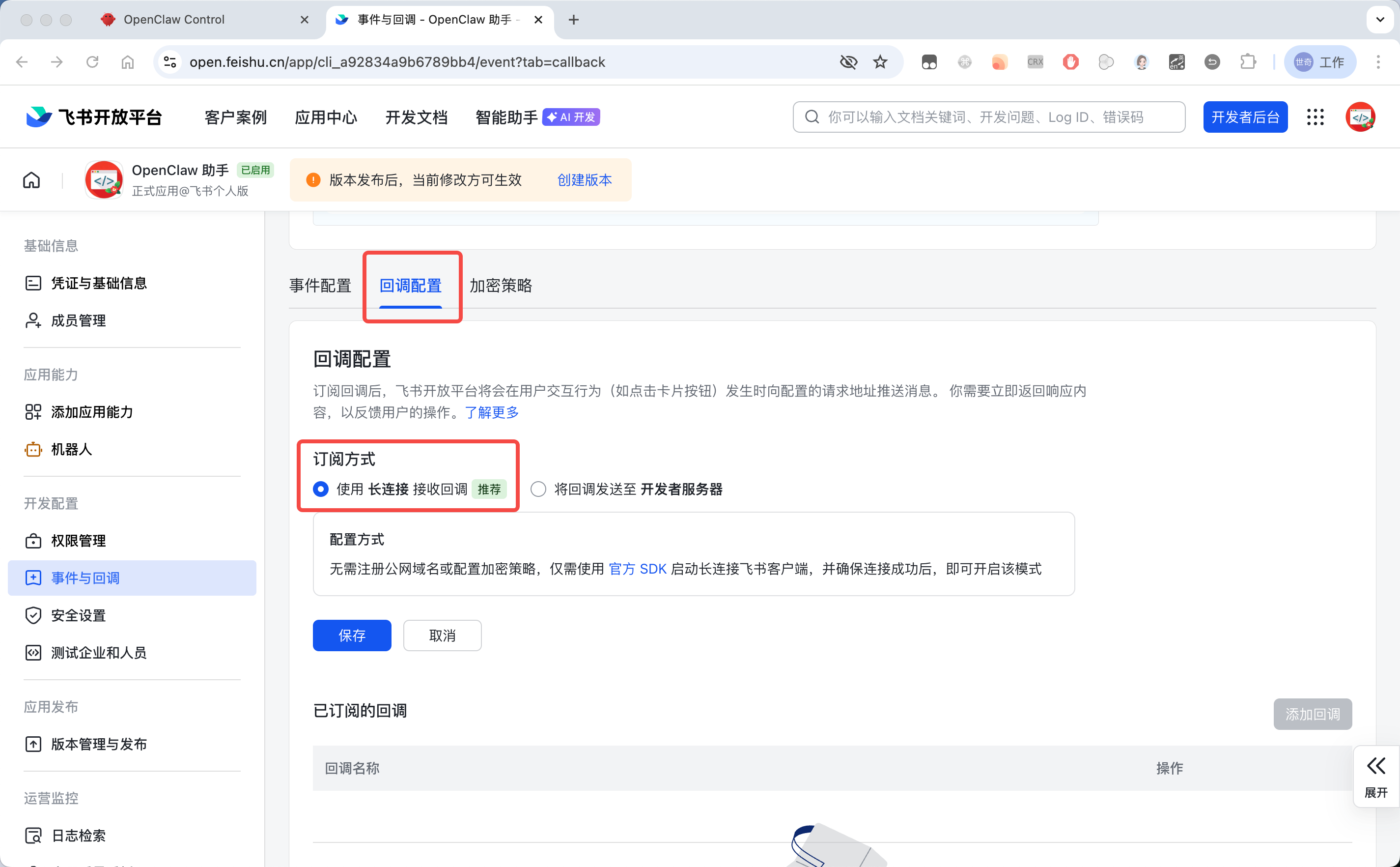
- 然后,我们对刚刚的配置更改进行重新发布
配对和测试
发布完成后飞书会收到一个结果通知,点击打开应用,即可和机器人发起对话:

在默认 dmPolicy: pairing 模式下,未知的发送者必须要完成配对才能成功对话。
首次发送信息机器人会在飞书私聊里直接回一条配对提示,里面包含一段配对码(Pairing code)。
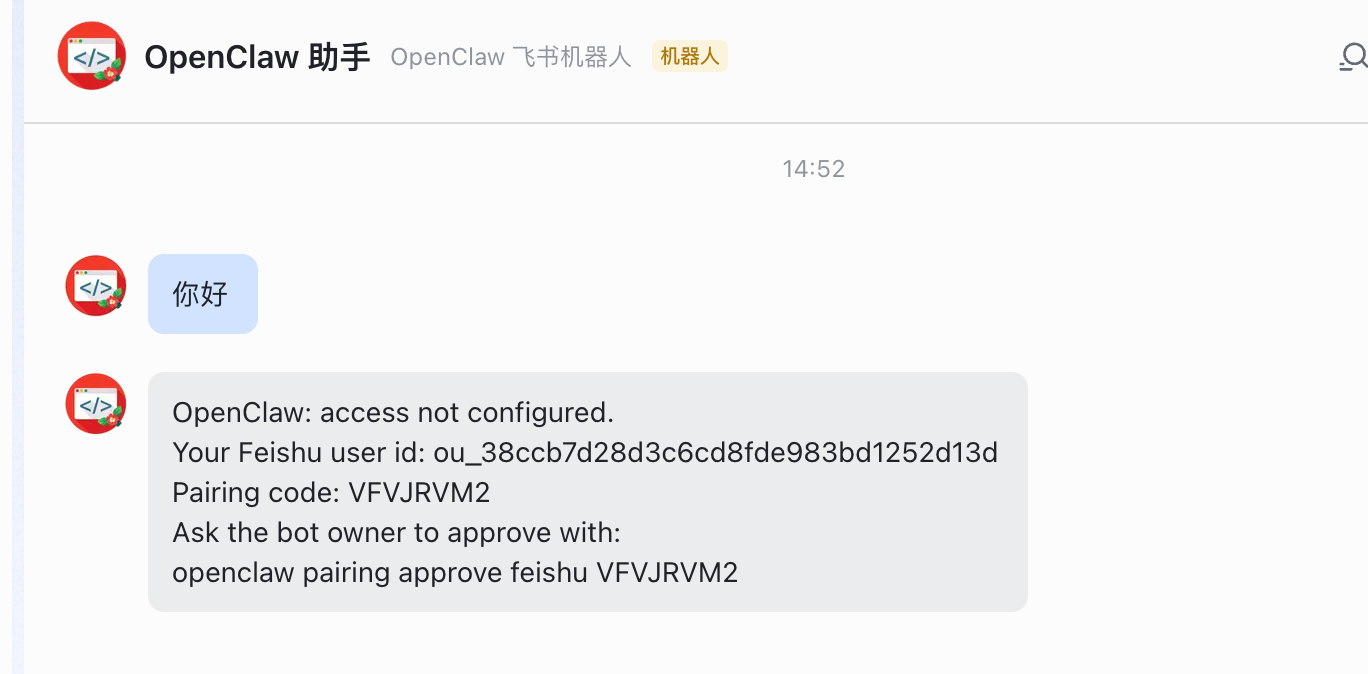
你需要复制这个配对命令,在终端中进行执行:
openclaw pairing approve feishu 配对码
接下来,你就可以在飞书中和 openclaw 进行对话啦:
